


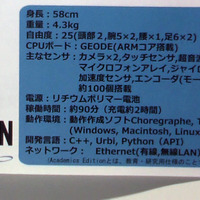
NAOのAPIを利用することで、C++、Urbi、pythonといった言語で作成したオリジナルソフトウェアでロボットを制御することが可能。頭部のカメラ、超音波センサなど約100個のセンサからの情報もプログラムから参照できる。クラウドにも対応できるよう、有線・無線LAN内蔵でインターネットなどと連携したサービス研究も視野に入れた設計になっているという。
身長は58cm、重量は4.3kg。電源はリチウムポリマー電池となっており、2時間の充電で約90分動作する。






《RBB TODAY》



