東芝、福島第一原子力発電所向けに4足歩行ロボットを開発
エンタープライズ
その他
注目記事





/
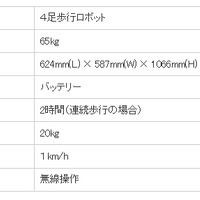
このロボットは、カメラや線量計を搭載しており、遠隔操作で原子力建屋内の状況把握が可能な作業ロボットとなっている。不整地や段差での歩行を制御するアルゴリズムと多関節構造を東芝が独自開発した。これにより、障害物を避けながら歩行したり、階段を移動したりすることが可能となっている。
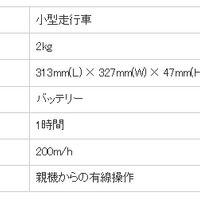
同時に、新開発したロボットから有線接続し、狭い場所や構造物の陰にある、設備・機器・配管の状態を撮影する小型走行車も同時開発されている。同社では今後も作業ロボットの技術開発を進め、遮蔽体の搬入・設置、止水作業、障害物搬出等の応用動作に対応できるよう改良を進める計画だ。
《冨岡晶》
特集
この記事の写真
/