【国際ロボット展】障害物の除去も!災害対策用ヒューマノイドロボット
エンタープライズ
企業
注目記事







/
会場では災害対応ヒューマノイドロボット「HYDRA」について、東京大学大学院情報理工学系研究科の中村仁彦教授から説明があった。これは、東京大学、千葉工学大学、大阪大学、神戸大学などのスタッフが集まり、現在開発を続けているもの。その名前の通りに油圧(ハイドローリックス)と水素燃料電池(ハイドロージェント)を使用していることが大きな特徴となる。
中村氏の説明によると、これまで力を精密に扱うことを目的とする、油圧を用いたアクチュエーターは存在しなかったということ。これを小型化してロボットに搭載するということで、今までにないロボットの制御技術の開発を目指す。
油圧制御では歯車のような部分的な接触ではなく、圧力が面で分散することが大きな魅力となる。このため、過酷な災害現場でも壊れにくいロボットを製造できるとのこと。さらに、歯車を使った減速機にはないような、微細な力の制御も可能になるという。なお、構造としては一つのシリンダーを動かすために、一つのモータがオンデマンドで油圧を作っており、これにより摩擦の小さな油圧を作ることができるという。
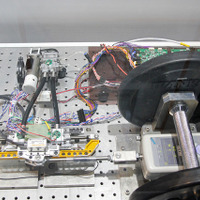
会場ではHYDRAに使われている燃料電池とバッテリによるハイブリッド電源、電気静油圧アクチュエーターの展示が行われた。将来的には軽量化を図ることで、ヘリコプターに乗って災害現場に駆け付けるといった、レンジャー部隊のような運用を想定しているという。
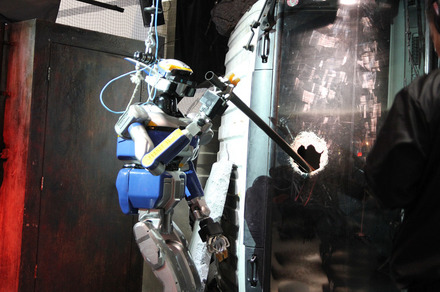
その他、会場では新たに登場した災害対策用ヒューマノイドロボットによるデモも行われた。これは、CEATEC JAPAN 2015でNEDOが主催した災害対策ロボットのバーチャル競技会「ジャパン・バーチャル・ロボティクス・チャレンジ(Japan Virtual Robotics Challenge:JVRC)」において、コンピューターシュミレーター上で作成したトンネル災害の現場を再現したものとなる。
デモでは落下したトラスをどけて、バルブを開けて水蒸気の発生を止める。ドアを開けてトラックの前まで進み、フロントガラスに突き刺さったパイプをどけて、中の様子を確認するというように、実際の災害現場でヒューマノイドロボットがどのように運用されるのか。その様子がロボットの挙動に関する解説を交えながら紹介された。
デモに登場したロボットの一体「HRP-2改」は、国立研究開発法人産業技術総合研究所にNEDOが委託開発したモデルとなる。川田工業株式会社と独立行政法人 産業技術総合研究所などが02年に共同開発したものを改造。新たに、脚腕が伸長する構造となり、間接軸構成も一部変更された。電装系も一新されており、LRFやカメラなどのセンサが追加されている。
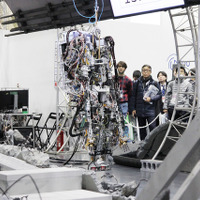
一方の「JAXON」は東京大学情報システム工学研究室が、HRP-2ヒューマノイドをプラットフォームに、10年以上に渡って開発してきた知能ロボットの基盤研究を背景にしたもの。高速高トルク水冷モータ駆動系開発研究、知能ロボットミドルウェアRTM-ROS相互運用研究、高速全身ダンス動作生成研究などが転用されている。
【国際ロボット展】NEDOの災害対策用ヒューマノイドロボット、トンネル災害時のデモも公開
《丸田鉄平/H14》

特集
この記事の写真
/






