【テクニカルレポート】ロボット技術を応用したオフィス用チェア「Leopard(レオパード)」(前編)……OKIテクニカルレビュー
エンタープライズ
ハードウェア
注目記事






/
そこで我々は、ロボットおよびロボット技術そのものを商品化・事業化するのではなく、ロボット技術の設計プロセスや、その派生的技術を用いるなど、ロボット技術を応用することで、新しい価値を創造し、既存の市場の拡大もしくは新市場の創造を模索することにした。この取り組みのひとつとして、ロボット技術をオフィス用チェアに応用することに着眼した。
本稿では、OKIと株式会社岡村製作所が共同開発した、業界初のロボット技術を応用したオフィス用チェア「Leopard(レオパード)」とその開発における取り組みについて紹介する。
●ロボット技術を応用したオフィス用チェア
OKIと株式会社岡村製作所は2008年11月4日、次世代に向けた新しいコンセプトのオフィス用チェア「Leopard(レオパード)」のコンセプトモデルを発表した。「Leopard」は、「抱きつつまれる座り心地」というコンセプトを実現するため、業界を超えた互いの技術を結集して開発された(写真1)。主な特長を以下に示す。
(1)「ホスピタリティ&タスク」という新しい発想「Leopard」には、オフィス用チェアとして求められる「上質な座り心地感」を、着座の瞬間から立ち上がりまでの一連の動作の中で常に感じることができるようにサポートする新しいメカニズムと、快適さをもたらすデザインを導入している。
「Leopard」は、クリエイティブな環境づくりに役立つオフィス用チェアとして、活発にコミュニケーションをするための「交流」の場や、一人でアイデアを整理してまとめあげる「集中」の場、さらには事務・経理などのタスクを行う「作業」の場など、オフィス内のあらゆるワークシーン、多様化したワークスタイルの中にあって「人への優しさ」が常に感じられるオフィス用チェアを目指した。
(2)身体の動きに追従
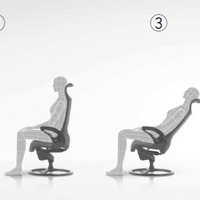
着座の瞬間から立ち上がりまでの一連の身体の動作に合わせて、背もたれと座面が追従する高いフィット感を実現した。一連の1~4の動作を図1に示す。
1.迎え入れる
座る人を迎え入れるように座面を高く立ち上がらせることで、着座までの距離が短くなっている。したがって着座時の衝撃が少なく、筋肉への負担を軽減しながら身体が自然に深く最適な位置に落ち着き、安心感をうみだす。
2.包み込む
座面が最大25度まで沈み込みながら、背もたれのメッシュ素材が身体をやわらかく受け入れ、深く包み込まれるような座り心地を体感できる。
3.やすらぎを与える
背もたれが最大27度やわらかくリクライニングし、ハンモックのような快適なやすらぎ感が楽しめる。
4.送り出す
リクライニング姿勢から立ち上がる姿勢まで、背もたれと座面が自然な感覚でレスポンス良く追従、サポートしながら身体を送り出す。このように「Leopard」は、「抱きつつまれる座り心地」というコンセプトを実現するため、OKIのロボット技術を応用して開発した。以下にこの取り組みについて紹介する。
●人間らしい跳躍着地を実現したロボットレッグ
ここでは、「Leopard」開発の起点となった、OKIのロボットレッグについて説明する。
OKIのメカトロニクス技術は、紙幣を計数したり、通帳のページをめくったりといった、人の目や手の動きの替りをする技術として発展してきた。このメカトロニクス技術の未来を担う技術として、OKIではロボット技術の開発を進めてきた。具体的には、人の骨格や筋肉のメカニズムを研究し、その特長を組み込むことで、人が潜在的に持っているさまざまな機能を実現できる可能性があると考えてきた。
写真2にロボットレッグの概観を示す。
ロボットレッグは、全高約540mm、重量約5kgの1脚型のロボットであり、腰部、大腿部、脛部、足部の4つのリンクと、股関節、膝関節、足関節の3つの関節部により構成される。ここに人の下肢の持つ拮抗二関節筋機構を工学的に応用し組み込んだ。これにより、高度なセンサや複雑な姿勢制御プログラムを用いずとも、人らしいバランスの良い跳躍着地運動を実現した。
●コンセプトは「抱きつつまれる座り心地」
社団法人日本ロボット工業会によると、将来のロボットの市場規模(予測)(2001年当時)は、生活分野での著しい拡大が予想され、2010年に1.5兆円、2025年に4.1兆円規模になると考えられていた3)。しかし、生活・サービス分野でのロボット、ロボット技術の市場拡大は今なお大きな課題となっており,2008年の市場規模は77億円に留まっている。
そこで我々は、ロボットレッグにおいて開発した技術の事業化を検討するにあたって、まず本技術の特長を下記のように整理した。
・人が持つしなやかな動き、バランスのよい動きを再現
・複雑な制御は不要
・限定された状況であれば、無電源で実現
つまり、高度な制御技術を用いることで実現してきた、人の持つしなやかでバランスの良い動きを、より単純な制御で実現することが本技術の特長である。このため、これまでロボット技術の採用が難しかった分野で利用の場面を広げることができると考えられる。この特長に基づいて、ロボットとして開発した技術を、ロボットとして利用せず、その技術を応用することで、市場に新しい価値を創造する新規商品・新規事業を検討することとした。
具体的には、この技術をヒューマンインタフェースとして応用することで、人が利用するさまざまな機器に新たな価値を提供できると考えた。こうした仮説と検証を繰り返す中で、「子供が親の膝の上に抱きかかえられるシーン」に注目した。つまり、人の骨格や筋肉のメカニズムを持ったロボットの膝の上に抱きかかえられることによって、「抱きつつまれる座り心地」のオフィス用チェアが開発できると考えたのである。
一方、働き方、働く環境の多様化に伴って、さまざまなオフィス空間が検討されている。その中で、高機能オフィス用チェアが人気を博しており、各社から多数の商品が発売されている。しかし、昨今のモバイル型PCの普及によって、オフィス環境での姿勢の悪化が問題視されている。このことからも、人の姿勢の変化に追従し、人の姿勢を好適に保つ新しいオフィス用チェアに対するニーズが存在すると考えられる。
このような背景から、「抱きつつまれる座り心地」というコンセプトを設定し、開発がスタートした。
※同記事はOKIの技術広報誌「OKIテクニカルレビュー」の転載記事である。
■執筆者紹介(敬称略)
・深井善朗:Zenroh Fukai. ヒューマンセンシング事業推進部アウンメカ事業推進チーム
《RBB TODAY》
特集
この記事の写真
/