【CEATEC 2015】国家プロジェクト「SIP」でドローン活用
IT・デジタル
その他
注目記事








/
SIPは、内閣府総合科学技術・イノベーション会議などが肝いりで進めている国家プロジェクトだ。SIPには、合計10個の課題があるが、このインフラ維持管理・更新・マネジメント技術では、高度成長期につくられた橋・道路・鉄道など、築後50年を経過した古い構造物の予防保全と維持管理を低コストで実現するという目的がある。
そこで芝浦工業大学は、橋梁点検用の半自律マルチコプターを開発し、ブース内で飛行デモを実施していた。このドローンの大きな特徴は、柔軟な静電吸着装置を搭載していること。マルチコプターを操縦しながら、橋などの構造物の壁面に近づき、壁面に吸着して、カメラで近接撮影が行える。
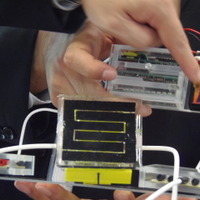
ポイントとなる静電吸着装置は、アクリルなど、どんな素材でも吸着できる優れモノだ。芝浦工業大学の長谷川忠大教授によれば、「乾電池の電圧を10,000Vまで昇圧して静電気を発生させ、約1kgの吸着力が得られる。装置自体は50×70mm、重さ100gと小型・軽量なので、マルチコプターに搭載しても影響がない」という。
このマルチコプターは、本体に市販の「DJI F550」を使用しており、LRF(レーザーレンジファインダー)とIMU(慣性航法ユニット)も搭載。CPUボードには「Raspgerry Pi 2」を採用している。
飛行中に収集したセンサーデータをもとに、空間座標を変換し、自律飛行へのシームレスな切り替えを目指すシステムも開発中だ。ひび割れの可能性がある箇所は、搭載カメラの映像からモニター上で赤く表示できるようにしているという。
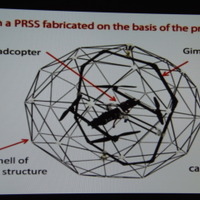
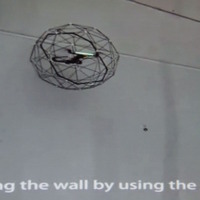
また同ブースでは、東北大学の田所研究室で開発しているインフラ点検用の「回転球殻を持つマルチコプタ」も展示していた。このドローンのユニークな点は、カーボンパイプ製の球殻でクアッドローター機の全周を保護し、さらにその球殻がジンバル機構によって機体と独立して回転することだ。
このアイデアによって、もし障害物に衝突しても、外側の球殻だけが回転し、中央のクアッドロータの位置は一定に維持される。また壁面などに沿って一定の距離(球殻の半径)を保ち、転がりながら走行(飛行)することも可能だ。
SIPにおいて、東北大学は、リコー・千代田コンサルタント・一般財団法人航空宇宙技術振興財団(JAST)と共同で、このようなドローンを用いて橋梁点検を行う研究を進めているところだ。最終的にはドローンで撮影した映像から橋の展開図を作成し、傷の種類と位置を検査員が判断できるシステムの開発を目指しているという。
《井上猛雄》
特集
この記事の写真
/
関連ニュース
-

【CEATEC 2015】フォーミュラEのテストカーが登場!
エンタープライズ -

【SPEED TEST】iPhone 6s通信速度レポート……CEATEC 2015 幕張メッセで測定
ブロードバンド -

【CEATEC 2015】風の動きをモニターで可視化……KOAがデモ
エンタープライズ -

【CEATEC 2015】アジア最大級のIT総合展、明日開幕……10日は無料公開
ブロードバンド -

【CEATEC 2015】三菱電機、ハイエンドオーディオ&カーナビの新製品を展示
IT・デジタル -

CEATEC JAPAN 2015、テーマは「NEXT-夢を力に、未来への挑戦」……開催概要が発表
ブロードバンド -

【CEATEC 2014 Vol.55】歩きスマホ解消も視野に!ドコモの「YUBI NAVI」
ブロードバンド