【テクニカルレポート】小惑星探査機「はやぶさ」の開発と成果(前編)……NEC技報
ブロードバンド
その他
注目記事





/
小惑星探査機「はやぶさ」は、月以遠の地球圏外の天体に着陸し、サンプルを地球に持ち帰った世界初の小惑星探査機です。NECは、「はやぶさ」のシステムインテグレータとして、システム全体の設計、製作、試験、運用を担当し、またバス機器やイオンエンジンなど多くの搭載機器も担当しました。
本稿では、「はやぶさ」の設計や運用の概要を示し、「はやぶさ」の開発・運用で得られた成果と、今後の事業へのつながりについて紹介します。
1.はじめに
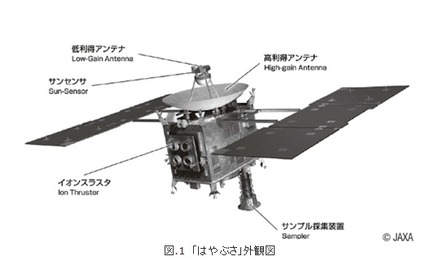
小惑星探査機「はやぶさ」(図1)は、世界初の小惑星サンプルリターン技術実証探査機として、2003年5月9日にM-Vロケット5号機により打ち上げられました。NECは、「はやぶさ」のシステムインテグレータとして、システム全体の設計、製作、試験、運用を担当し、またバス機器やイオンエンジンなど多くの搭載機器を担当しました。
「はやぶさ」に課された技術実証課題は、1)惑星間航行用主エンジンとしてのイオンエンジンの実証、2)光学航法による自律誘導制御の実証、3)微小重力下でのサンプル採取技術の実証、4)惑星間軌道から再突入する回収カプセル技術の実証、の4つです。いずれも難易度の高い課題でしたが、それらすべてを2010年6月13日のカプセル帰還をもって成功裏に完遂することができました。
また、その結果、人類史上初の小惑星のサンプル入手という、太陽系の起源の研究に大きく寄与することが期待される画期的な成果を得ることができました。
今回「はやぶさ」で得られたものは、これら主要技術課題の実証や科学成果だけではなく、未知の小惑星へのタッチダウン時や、帰路で起きた種々の試練を工夫で乗り越えてきた経験から得られた、運用技術、システム技術への知見であり、これらは今後の太陽系探査技術の大きな礎となるものといえるでしょう。
今回の「はやぶさ」の7年間60億kmに及ぶ旅の物語とカプセル帰還の映像は、報道により社会に広く知られることとなり、国民の宇宙開発に対する理解を深めるきっかけになったと同時に、技術立国日本のチャレンジ精神と組織力、人間力の健在ぶりを社会に認知していただき、また、「はやぶさ」プロジェクトにかかわった非常に多くの企業に喜びを持って祝っていただくことができました。
本稿では、「はやぶさ」のプロジェクト概要を紹介すると同時に、「はやぶさ」で得られた成果、今後の事業へのつながりについて紹介します。
2.ミッションの概要
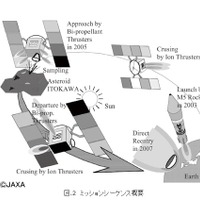
図2に「はやぶさ」のミッションシーケンスの概要を示します。「はやぶさ」のミッションは、小惑星イトカワにタッチダウンしてサンプルを採取し、地球に持ち帰ることであり、そのシーケンスは、一筆書きのように直列に成功させていかないと失敗した時点でミッションが終わってしまうという難易度の高いものでした。
3.システム設計概要
3.1全体設計
「はやぶさ」は1m×1.5m×1.1mの箱型の本体に、固定式の高利得アンテナ、固定式の太陽電池などの外部機器を搭載した、総重量510kg(燃料142kgを含む)の探査機です。姿勢制御はリアクションホイール(RW)を用いて行いますが、小惑星へのタッチダウン運用時には、RWの他、20N推力の12基の推進系(化学燃料)RCS(Reaction Control Subsystem)を用いて、姿勢と位置の6軸自由度制御を行います。
「はやぶさ」の代表的システム主要諸元を表1に示します。
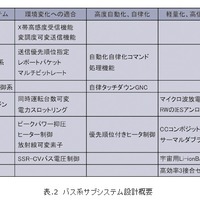
「はやぶさ」のシステム設計の課題は、大きく分類すると1)太陽距離や小惑星により大きく変わる環境条件に適合すること、2) 高度な自動化、自律化制御機能を持つこと、3)軽量で高信頼性を有するシステム構成及び要素技術を採用すること、の3点に集約することができます。
「はやぶさ」ではこれらの課題を解決するため、それ以前の科学衛星のバスに対しほぼ全面的な見直しを実施しました。
バス設計の課題に対応したバス系サブシステムの設計概要を表2に示します。
(1)電源系バス電圧制御方式
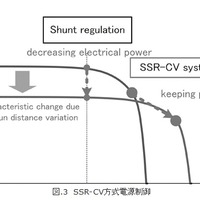
「はやぶさ」の軌道上環境は太陽距離が大きく変化する環境であるため、その位置の太陽光強度に応じた最大限の電力を引き出せる、SSR-CV方式と称するレギュレータ方式のバス電源制御方式としました (図3) 。
(2)電源系バッテリ
「はやぶさ」に課された厳しい軽量化要求を満たすため、それ以前のNiMH(Nickel Metal Hydride)バッテリに代えて、宇宙機搭載用に開発された電池では世界初となるLi-ion2次電池(定格容量13.2Ah)を搭載しました。
(3)通信系、データ処理系
深宇宙通信用として、火星探査機「のぞみ」以前の通信系構成である、Sバンドアップリンク、Xバンド/Sバンドダウンリンクのシステムに変え、Xバンドアップリンク、Xバンドダウンリンク(Xバンド受信機/Xバンド送信機)のシステムを新たに搭載しました。
これにより、通信系の軽量化を実現した他、アップリンクに対する太陽コロナの干渉が改善され、イトカワとのランデブー直前に「はやぶさ」と地球の間に太陽が入る合の位置関係のときに生じる通信干渉期間を少なく抑えることができました。
また、リソース上、限られた通信能力を最大限に生かすため、ダウンリンクは2n刻みのビットレートを状況に応じて選択し、最大限のビットレートで通信が可能となるマルチビットレート方式を採用しました。
(4)データ処理系テレメトリ/コマンド
いったんデータレコーダに蓄えたハウスキーピングのデータは、2秒ごとのサンプリングデータから1,024秒サンプリングデータまで、自由に選んでダウンリンクできる方式としました。
これにより、運用時間と回線状況に応じ、優先して下ろすべきデータの種類と順序を指定し、例えば時間間隔の粗い、時間的に間引きされたデータをダウンリンクして状態を確認し、詳細に確認が必要な事象があった場合には、その時間周辺だけを指定して時間間隔の詳細なデータをダウンリンクするなどの運用を行うことで、低速の通信しかできない状態のなかでも、必要なデータだけを無駄なくダウンリンクすることができました。
また、探査機が、機上の判断で自律的な動作を行ったり、異常が発生したりした場合は、それらイベントの発生時刻と事象の内容を示す数バイトのコードを、非常に小さなパケットとして優先的にダウンリンクするレポートパケットを設けました。これにより、回線が細いなかでも、真に必要な情報を最初に確認することができ、異常発生時にも最短時間で状況把握に役立てることができました。
(5)データ処理系自動化/自律化
探査機に登録したコマンドシーケンスを制御する手段として、複数のコマンドをカプセル化したマクロ機能、絶対時刻指定でコマンド発行を計画制御するタイムライン機能を持ち、また、探査機上でのテレメトリを監視して自律的にコマンドを発行する自律機能、搭載機器側からシステムに特殊な自律制御を開始するよう要求するリクエスト機能、システムが定常的に行われる運用を監視するウォッチドッグタイマー(WDT)を持ち、タイムアウト時には自律的にバックアップのモードに移るためのタイマー機能を有しています。
これらの機能を最大限に活用し、一定期間通信が取れないときに探査機が自律的に待ち受けモードを切り替える処理や、テレメトリ回線が不成立のときのダウンリンクキャリアでON/OFFによる通信(1bit通信)などを行いました。
(6)熱制御系
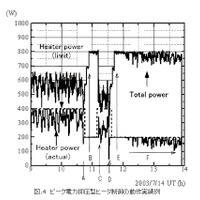
太陽電池発生電力を余すことなくイオンエンジンに供給するために、128chの独立したヒータのON/OFFのタイミングを調整し、消費電力を平滑化してピーク電力を抑える制御を行うソフトウェア制御のHCE(Heater Control Electronics)を搭載しました。
太陽からの距離が遠いところでは、探査機は、発生可能な電力の最大限まで、イオンエンジンに電力を供給しているため、その状態で多数のチャンネルのヒータONタイミングが重なって消費電力が瞬時に上昇すると、消費電力が発生電力を超え、太陽電池動作電圧が瞬時にBAT電圧まで降下し、過負荷が解消された後もBATの放電が続くロックアップという危険なモードに陥ります。それを防ぎつつイオンエンジンへの最大限の電力供給を行うため、ヒータピーク電力を抑圧する機能を新たに開発して搭載しました。
本機能により、発生電力の上限までの電力を引き出して、イオンエンジンに電力を供給することができました。
動作実績例を図4に示します。
また、ヒータチャンネルごとに優先度を設定することで、設定したヒータ電力が不足する場合でも、凍結の許されない推進系やBATを優先して温度を維持し、更には温度計測が異常なチャンネルに対しては、自律的にオープンループのデューティ制御に切り替えるなどのインテリジェントな機能を設けて、ロバストな温度制御を行いました。
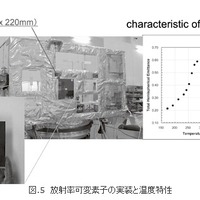
その他、運用モードにより発熱が大きく変化する場所の放熱材料として、放射率可変素子(SRD:Smart Radiation Device)を新たに開発実装しました(図5)。この材料は図5に示すように温度により大きく赤外放射率が変化します。この特性により、高温時は大きな放熱能力を有しますが、低温時には放熱しにくくなり、保温のために必要なヒータ電力を削減できます。
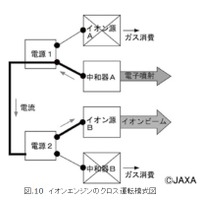
(7)イオンエンジン
探査機は常に+Zを太陽方向に向けて運用するシステム設計となっています。太陽を周回する探査機の軌道制御は太陽方向とは直角方向に推進力を出すと効率が良いため、4機のイオンエンジンスラスタは、太陽方向と直角方向である+X面に2軸ジンバル機構を有したプレートを介して搭載しています。各スラスタは、探査機の重心方向を指向するよう搭載していますが、推力ベクトルの重心からのずれは、ジンバル角を制御することで補正します。このジンバルの制御を用いることで、イオンエンジンを運転している間は、外乱をキャンセルするトルクを発生することが可能であり、本機能を用いて貴重な化学推進エンジンを使った蓄積外乱キャンセルを最小限に抑えています。
イオンエンジンの探査機への実装状態を写真1に示します。
イオンエンジンは電力を推進力に変換する装置であるため、大きな電力を必要としますが、太陽電池から得られる電力は、「はやぶさ」が飛行している軌道位置の太陽距離により、大きく変化します。そのため、太陽電池の発生電力の変化に応じ、最小スラスタ1台運転から最大3台同時運転まで運転台数を切り替えられるシステムとしており、また、各スラスタの推力も可変(スロットリング)として、常に最大限の電力をイオンエンジンの推進力に注入できる電力供給設計と、それを前提とした軌道設計を行いました。
■執筆者(敬省略)
・萩野慎二
航空宇宙・防衛事業本部
宇宙システム事業部
シニアマネージャー
※同記事はNECの発行する「NEC技報」の転載記事である。
《RBB TODAY》
特集
この記事の写真
/