








「プロジェクトの予算はラフに見積もって10億円。そのうち半分が探査機を月に送り出すための打ち上げ費用になるが、そのコストが探査機の質量によって変動する。そのため、探査機をできる限り小さくすれば費用が圧縮できる。いま開発している探査機の質量は“4kg”を目安にしている。比較を挙げるなら、現在火星に送られている米国の探査機“Quriocity”の質量は900kg、中国のYutuも100kgを超える。レースのライバルであるAstrobotic社が開発する探査機が30kgを見込んでいるので、当社が目指す4kgがいかに小さいか理解いただけるだろう。小さなものをつくる技術は日本が得意とするところ」と、袴田氏は胸を張る。
もう一つの戦略である「民生品の活用」については、これまでの宇宙機器のように用途に特化して1点ものの機器やパーツを開発するスタイルをやめて、開発が終了している既製品を使うことで、プロジェクトに必要なコストを下げてスピード感を上げていことが主な狙いだ。袴田氏は「既製品を使って十分に実現できることが見えている」と主張する。
2007年にスタートしたレースは、これまでに30を超えるチームが参加してきたが、途中休止や企業の合併・買収などにより、現在参加する16チームにプレーヤーが絞られてきた。勝利すること以前に、続けることの難しさを味わうチームも少なくないなか、HAKUTOチームは昨年の1月に他の参加チーム4者とともに「中間賞」を受賞。プロジェクトの進行に弾みをつけてきた。
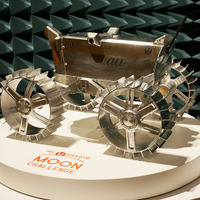
本日行われたイベントの壇上では、ただいまHAKUTOチームとKDDIが共同で開発を進める4輪型の月面探査機(ローバー)の開発機が公開さえ、簡単な試走デモが行われた。壇上でゆっくりと前後に動く探査機は、月面で想定している走行スピードが秒速約10cm。非常にゆっくりとしたスピードのように思えるが、未知の月面エリアを地球から遠隔操作しながら、障害物を検知して避けて動かすことを考えれば妥当な速度だ。本体には4台のカメラが搭載されていて、レースのミッションにも規定されている前後左右360度のパノラマ視野が得られるように設計されている。